4.1 Katse Temperatuuri andur
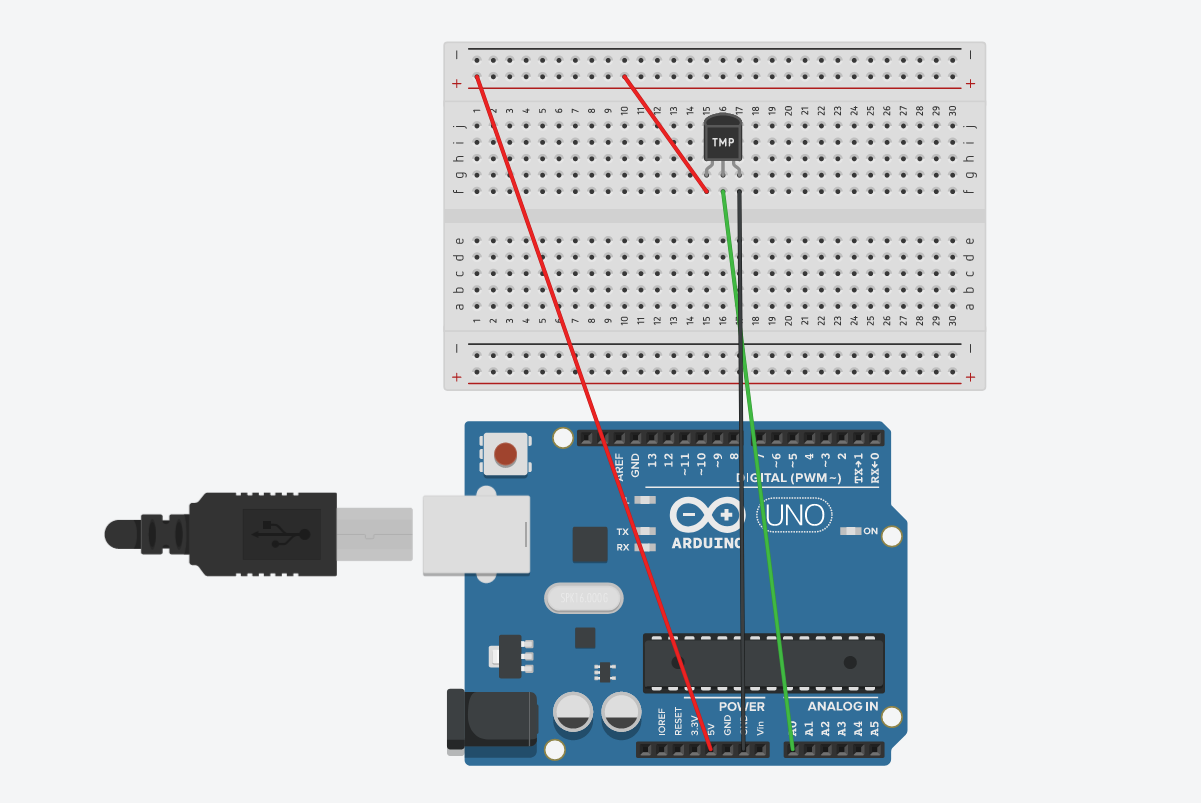
kasutatud komponendid:
- andur TMP36
- juhe 5x
kood:
const int temperaturePin = 0;
void setup()
{
Serial.begin(9600);
}
void loop()
{
float voltage, degreesC, degreesF;
// kasutame analogRead(), mis tagastab sisendi väärtused vahemikul 0 ... 1023.
// koostasime getVoltage() funktsioon, mis tagastab pingeväärtus 0 ... 5,
voltage = getVoltage(temperaturePin);
degreesC = (voltage - 0.5) * 100.0;
// degreesC = voltage * 100.0;
degreesF = degreesC * (9.0/5.0) + 32.0;
Serial.print("voltage: ");
Serial.print(voltage);
Serial.print(" deg C: ");
Serial.print(degreesC);
Serial.print(" deg F: ");
Serial.println(degreesF);
//Ekraanil ilmub järgmine tekst: "voltage: 0.73 deg C: 22.75 deg F: 72.96"
delay(1000); // ootame 1 sek
}
float getVoltage(int pin)
{
return (analogRead(pin) * 0.004882814);
// teisendame pinge vahemikust 0,0 ... 5,0 V, vahemikku 0 до 1023.
}
4.2. Katse Servo kasutamine
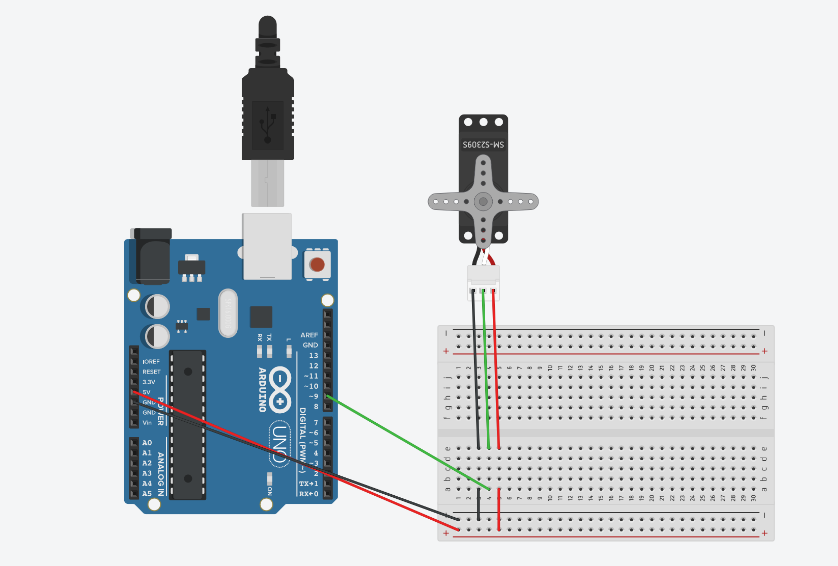
kasutatud komponendid:
- servo motoor
- juhe 8x
kood:
// Множество библиотек доступных для применений, можно найти на http://arduino.cc/en/Reference/Libraries,
#include <Servo.h> // nii teavitame Arduino IDE-t vajadusest kasutada Servo.h teeki (подключаем дополнительную библиотеку)
// Как только вы "подключаете" библиотеку, так сразу получаете доступ к этим функциям. Вы можете найти список функций в библиотеке
// сервопривода в: http://arduino.cc/en/Reference/Servo. Большинство библиотек доступно из меню "Файл / примеры".
Servo servo1; // Peame looma servo objekti nimega servo1 (объект управления сервоприводом)
void setup()
{
// Сейчас мы прикрепим (attach) объект servo1 к цифровому пину 9. Если вы собираетесь управлять более чем одним
// сервоприводом, Вы должны прикрепить каждый новый объект серво к своему, отдельному порту, причем это порт должен быть цифровым.
servo1.attach(9); //ütleme Arduinole, et infosuhtlus servo-objektiga servo käib läbi klemmi number 9. Tegu on digitaal-klemmiga--PWM digitaalne osa! Kontrollime, kas skeemil kasutame sama klemmi.
}
void loop()
{
int position;
servo1.write(90); //pööramise nurk =90
delay(1000);
servo1.write(180); //pööramise nurk =180
delay(1000);
servo1.write(0); //pööramise nurk =0
delay(1000);
// servo positsiooni muutmine väike kiirusega pärisuunas:
for(position = 0; position < 180; position += 2)
{
servo1.write(position); // positsiooni muutmine
delay(20);
}
// servo positsiooni muutmine väike kiirusega vastupäeva:
for(position = 180; position >= 0; position -= 1)
{
servo1.write(position); // positsiooni muutmine
delay(20);
}
}
Ülesanne 4 Temperatuuritundlik servolülitus
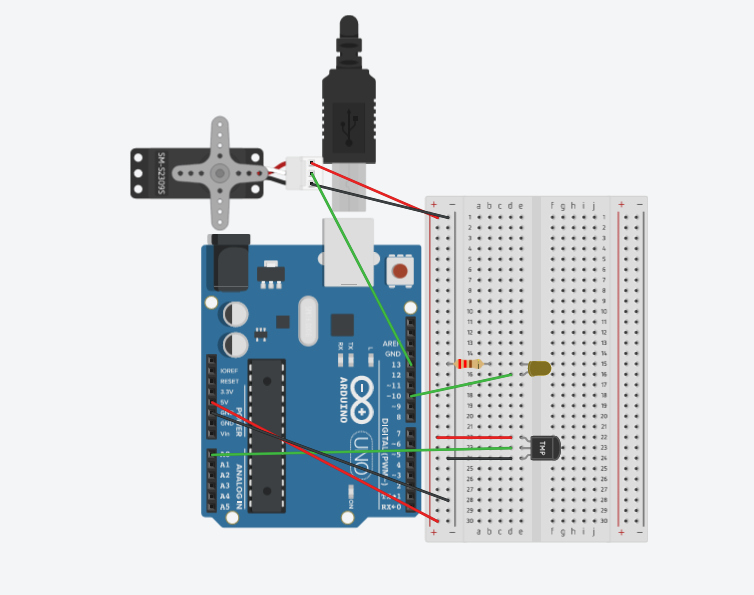
kasutatud komponendid:
- servo motoor 1x
- juhe 9x
- diood 1x
Kood:
#include <Servo.h>
Servo servo1;
const int temperaturePin = A0;
const int ledPin = 8;
void setup() {
servo1.attach(13);
pinMode(ledPin, OUTPUT);
Serial.begin(9600);
}
void loop() {
float voltage, degreesC;
voltage = getVoltage(temperaturePin);
degreesC = (voltage - 0.5) * 100.0;
Serial.print("Temperature: ");
Serial.println(degreesC);
if (degreesC >= 24) {
servo1.write(180);
digitalWrite(ledPin, HIGH);
} else if (degreesC <= 23) {
servo1.write(0);
digitalWrite(ledPin, LOW);
}
delay(1000);
}
float getVoltage(int pin) {
return (analogRead(pin) * (5.0 / 1023.0));
}
Video: